使用AIxBoard与LabVIEW实现麦克纳母轮小车的控制
 小o
更新于 3年前
小o
更新于 3年前
简介
本项目旨在探索和实现利用AIxBoard开发板和LabVIEW软件平台对麦克纳母轮小车的精确控制。麦克纳母轮小车以其灵活的移动能力和广泛的应用前景在机器人领域受到广泛关注,目前作为创新动手平台,已广泛应用于各大中小学以及高校的STEAM教育中。
基于英特尔®N5105处理器的AIxBoard开发板是一款功能强大的小型计算机,专为支持入门级边缘人工智能应用程序和设备而设计。无论是在人工智能学习、开发还是实训等应用场景下,它都能完美胜任。
NI LabVIEW则是一款图形化编程环境,以其直观的编程方式和丰富的数据处理能力深受工程师们的喜爱。
在本项目中,我们将AIxBoard和LabVIEW结合,通过设计和实现适合麦克纳母轮小车的控制算法,实现对麦克纳母轮小车的实时控制。本文范例代码:
git clone GitHub - aiblockly/aixbroad_code_example: 存放范例代码
Mbot mega麦轮小车简介
mBot Mega是一款先进的二合一机器人套件。全金属外壳,科技感十足,自主拼装,享受动手乐趣与成就感。4个直流电机搭配全向移动麦克纳姆轮,可进行机器人移动算法学习,实现万向移动等更灵活更高级的机器人运动控制,尽享超感遥控体验。配备18650充电锂电池,2600mAh容量,为澎湃动力提供强劲电量。搭载多种智能传感器,可实现手势识别。支持图形化编程、Python、Arduino C语言编程。
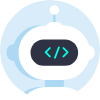
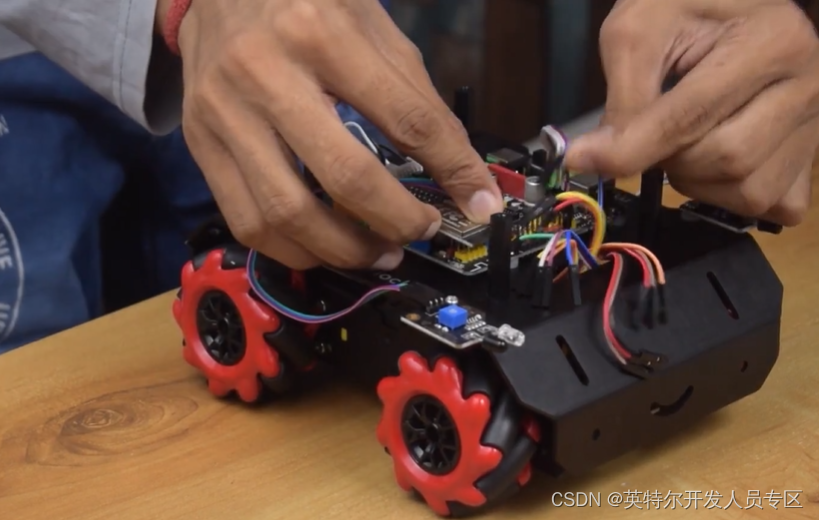
组装麦轮小车
请按照说明文档对麦轮小车进行组装,首先是小车本体的组装,随后需要将AIxBoard安装在小车上,具体可以参考图或相关文档。
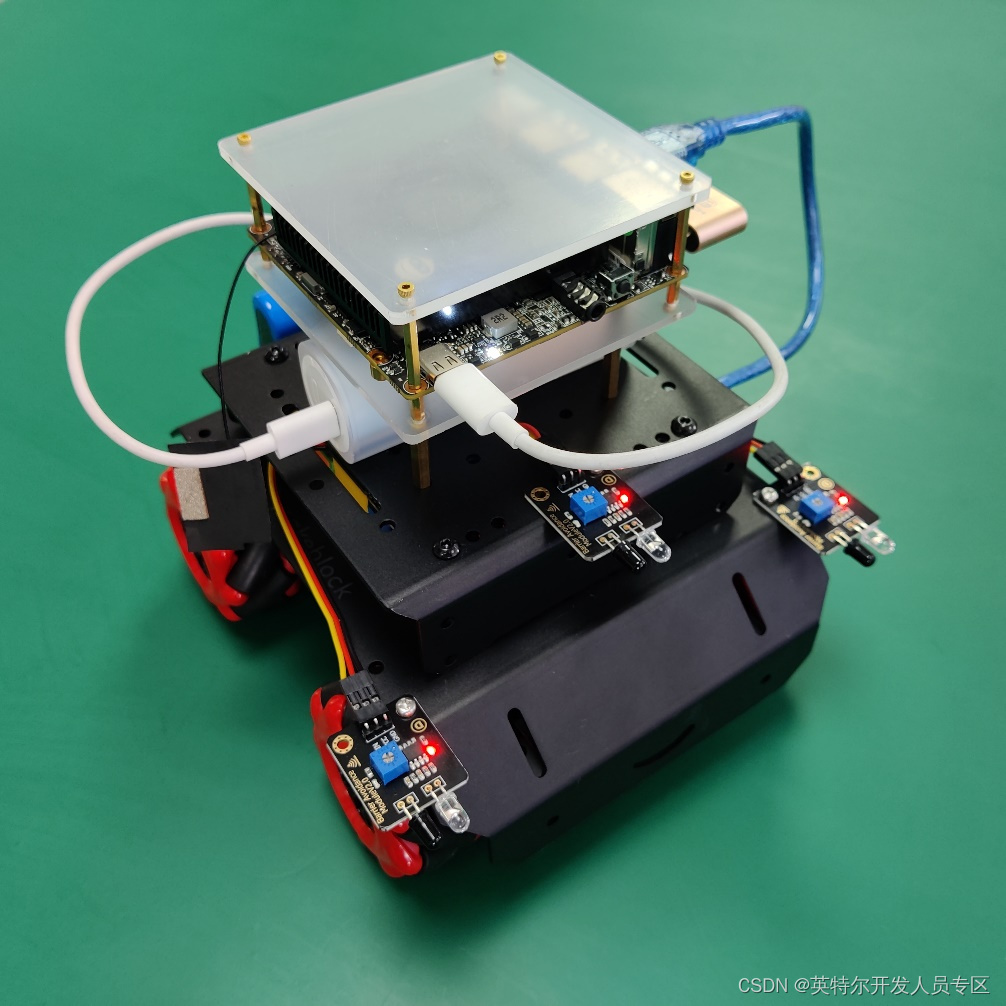
开发LabVIEW程序
我们可以使用Python代码来实现对麦轮车的控制(如下图)。
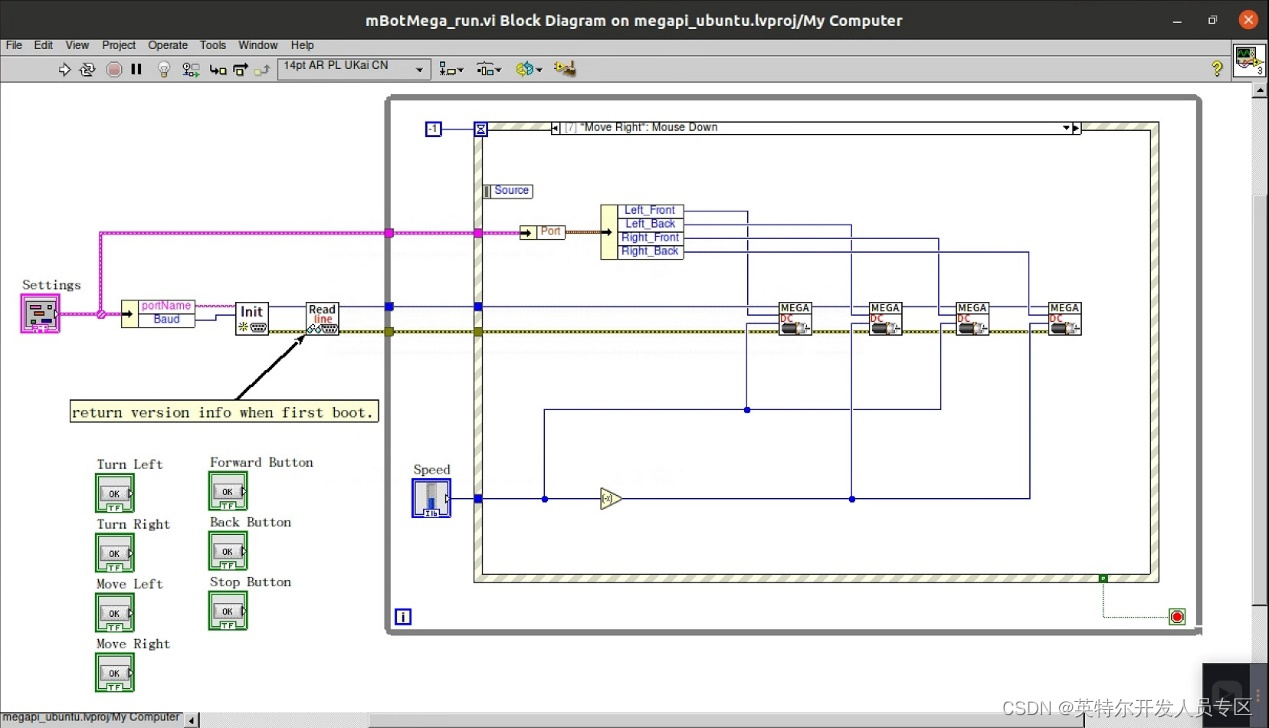
不过相比而言,使用NI LabVIEW图形化编程平台让开发更为简明,如下图程序所示,简单的一个事件循环就实现了对麦轮车的基本运行控制(界面)。
结论:
通过本项目的实践探索,我们验证了AIxBoard与LabVIEW联合实现对麦克纳母轮小车的精确控制的可能性和有效性。LabVIEW的图形化编程环境不仅使得控制逻辑的设计和实现更为直观,而且其丰富的数据处理能力也为我们提供了强大的后盾。同时,AIxBoard控制板以其高性能处理器和丰富的接口,有效地执行了我们设计的控制算法,实现了对麦克纳母轮小车的控制。
值得指出的是,这样的软硬件结合模式不仅限于实现麦克纳母轮小车的基本运动控制,其开放的设计和强大的处理能力为我们提供了在此基础上实现更多人工智能算法的可能性。例如,我们可以在此系统上实现自主导航、避障、物体追踪等高级功能,从而将麦克纳母轮小车开发成一个功能强大的移动机器人平台。




更为重要的是,这种结合AIxBoard和LabVIEW的控制方式也为STEAM教育提供了一种新的可能。通过编程控制麦克纳母轮小车,学生们可以更好地理解和学习科学、技术、工程、艺术和数学相关的知识,同时也能激发他们的创新思维和动手能力。我们期待看到,麦克纳母轮小车在此控制系统的驱动下,能够成为STEAM教育的一种新的、有趣的教学工具,激发更多学生对科技创新的兴趣。
上海仪酷智能科技有限公司简介:
上海仪酷智能科技有限公司是国内领先的人工智能软件提供商和机器人应用开发商,开发了低代码可重构的人工智能定制平台,包括基于边缘计算的高性能、高性价比工业硬件,以及跨平台的图形化深度学习视觉软件,满足智能制造、智慧医疗、智慧教育等多个领域的定制化需求;同时为广大院校用户搭建了人工智能教育软硬件平台(语音交互套件、无人驾驶套件、机械臂套件、以及支持所有硬件的云端实验平台);公司是百度、软银机器人、NI、Intel的战略合作伙伴,科大讯飞创投生态圈下企业,连续多年上海交通大学优秀合作伙伴,上海市高新技术企业,姑苏领军人才,且入驻百度飞桨人工智能产业赋能中心,拥有70余项专利及著作权,总部位于上海,于苏州、安庆设立分公司。
————————————————
版权声明:本文为CSDN博主「英特尔开发人员专区」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/gc5r8w07u/article/details/130720762