【哪吒开发板试用】基于哪吒开发套件实现yolov8推理部署(一)
 openlab_96bf3613
更新于 1年前
openlab_96bf3613
更新于 1年前
产品介绍
哪吒(Nezha)开发套件以信用卡大小(85 x 56mm)的开发板-哪吒(Nezha)为核心,哪吒采用Intel® N97处理器(Alder Lake-N),最大睿频3.6GHz,Intel® UHD Graphics内核GPU,可实现高分辨率显示;板载LPDDR5内存、eMMC存储及TPM 2.0,配备GPIO接口,支持Windows和Linux操作系统,这些功能和无风扇散热方式相结合,为各种应用程序构建高效的解决方案,适用于如自动化、物联网**、数字标牌和机器人等应用。
开发套件包含哪吒(Nezha)开发板,电源适配器,无线网卡。
该项目所需硬件
1. 哪吒开发板
2. u**相机(720p 1280 × 720)
项目使用nuget包
OpenCvSharp4
OpenCvSharp4.runtime.win
Sdcb.OpenVINO
Sdcb.OpenVINO.Extensions.OpenCvSharp4
Sdcb.OpenVINO.runtime.win-x64
代码 https://github.com/sdcb/sdcb-openvino-yolov8-det
using OpenCvSharp.Dnn;
using OpenCvSharp;
using Sdcb.OpenVINO.Extensions.OpenCvSharp4;
using Sdcb.OpenVINO;
using System.Diagnostics;
using System.Xml.Linq;
using System.Xml.XPath;
Console.WriteLine("请输入模型路径");
string? modelFile = Console.ReadLine();
string[] dicts = XDocument.Load(modelFile ?? string.Empty)
.XPathSelectElement(@"/net/rt_info/model_info/labels")!.Attribute("value")!.Value
.Split(' ');
using VideoCapture vc = new(0);
using Model rawModel = OVCore.Shared.ReadModel(modelFile ?? string.Empty);
using PrePostProcessor pp = rawModel.CreatePrePostProcessor();
using (PreProcessInputInfo inputInfo = pp.Inputs.Primary)
{
inputInfo.TensorInfo.Layout = Layout.NHWC;
inputInfo.ModelInfo.Layout = Layout.NCHW;
}
using Model m = pp.BuildModel();
using CompiledModel cm = OVCore.Shared.CompileModel(m);
using InferRequest ir = cm.CreateInferRequest();
Shape inputShape = m.Inputs.Primary.Shape;
Size2f sizeRatio = new Size2f(1f * vc.FrameWidth / inputShape[2], 1f * vc.FrameHeight / inputShape[1]);
while (vc.Grab())
{
using Mat src = vc.RetrieveMat();
Stopwatch stopwatch = new();
using Mat resized = src.Resize(new Size(inputShape[2], inputShape[1]));
using Mat f32 = new();
resized.ConvertTo(f32, MatType.CV_32FC3, 1.0 / 255);
using (Tensor input = f32.AsTensor())
{
ir.Inputs.Primary = input;
}
double preprocessTime = stopwatch.Elapsed.TotalMilliseconds;
stopwatch.Restart();
ir.Run();
double inferTime = stopwatch.Elapsed.TotalMilliseconds;
stopwatch.Restart();
using (Tensor output = ir.Outputs.Primary)
{
ReadOnlySpan<float> data = output.GetData<float>();
DetectionResult[] results = DetectionResult.FromYolov8DetectionResult(data, output.Shape, sizeRatio, dicts);
double postprocessTime = stopwatch.Elapsed.TotalMilliseconds;
stopwatch.Stop();
double totalTime = preprocessTime + inferTime + postprocessTime;
Cv2.PutText(src, $"Preprocess: {preprocessTime:F2}ms", new Point(10, 20), HersheyFonts.HersheyPlain, 1,
Scalar.Red);
Cv2.PutText(src, $"Infer: {inferTime:F2}ms", new Point(10, 40), HersheyFonts.HersheyPlain, 1, Scalar.Red);
Cv2.PutText(src, $"Postprocess: {postprocessTime:F2}ms", new Point(10, 60), HersheyFonts.HersheyPlain, 1,
Scalar.Red);
Cv2.PutText(src, $"Total: {totalTime:F2}ms", new Point(10, 80), HersheyFonts.HersheyPlain, 1, Scalar.Red);
foreach (DetectionResult r in results)
{
Cv2.PutText(src, $"{r.Class}:{r.Confidence:P0}", r.Rect.TopLeft, HersheyFonts.HersheyPlain, 1, Scalar.Blue);
Cv2.Rectangle(src, r.Rect, Scalar.Blue, thickness: 2);
}
Cv2.ImShow("frame", src);
Cv2.WaitKey(1);
}
}
public record DetectionResult(int ClassId, string Class, Rect Rect, float Confidence)
{
public static DetectionResult[] FromYolov8DetectionResult(ReadOnlySpan<float> tensorData, Shape shape,
Size2f sizeRatio, string[] dicts)
{
// tensorData: 1x84x8400=705600xF32
// shape: 1x84x8400, 84=(x, y, width, height)+80 class confidences, 8400=possible object count(code should for loop 8400 first)
float[] t = Transpose(tensorData, shape[1], shape[2]);
List<DetectionResult> detResults = new();
int objectCount = shape[2];
int clsRowCount = shape[1];
if (dicts.Length != clsRowCount - 4)
throw new ArgumentException(
$"dicts length {dicts.Length} does not match shape cls row count{clsRowCount}.");
for (int i = 0; i < objectCount; i++)
{
ReadOnlySpan<float> rectData = t.AsSpan()[(i * clsRowCount)..(i * clsRowCount + 4)];
ReadOnlySpan<float> confidenceInfo = t.AsSpan()[(i * clsRowCount + 4)..(i * clsRowCount + clsRowCount)];
int maxConfidenceClsId = IndexOfMax(confidenceInfo);
float confidence = confidenceInfo[maxConfidenceClsId];
int centerX = (int)(rectData[0] * sizeRatio.Width);
int centerY = (int)(rectData[1] * sizeRatio.Height);
int width = (int)(rectData[2] * sizeRatio.Width);
int height = (int)(rectData[3] * sizeRatio.Height);
detResults.Add(new DetectionResult(
maxConfidenceClsId, dict***axConfidenceClsId],
new Rect(centerX - width / 2, centerY - height / 2, width, height),
confidence));
}
CvDnn.NMSBoxes(detResults.Select(x => x.Rect), detResults.Select(x => x.Confidence), scoreThreshold: 0.5f,
nmsThreshold: 0.5f, out int[] indices);
return detResults.Where((x, i) => indices.Contains(i)).ToArray();
}
static int IndexOfMax(ReadOnlySpan<float> data)
{
if (data.Length == 0) throw new ArgumentException("The provided data span is null or empty.");
// 初始化最大值及其索引
int maxIndex = 0;
float maxValue = data[0];
// 遍历跨度查找最大值及其索引
for (int i = 1; i < data.Length; i++)
{
if (data[i] > maxValue)
{
maxValue = data[i];
maxIndex = i;
}
}
// 返回最大值及其索引
return maxIndex;
}
static unsafe float[] Transpose(ReadOnlySpan<float> tensorData, int rows, int cols)
{
float[] transposedTensorData = new float[tensorData.Length];
fixed (float* pTensorData = tensorData)
{
fixed (float* pTransposedData = transposedTensorData)
{
for (int i = 0; i < rows; i++)
{
for (int j = 0; j < cols; j++)
{
// Index in the original tensor
int index = i * cols + j;
// Index in the transposed tensor
int transposedIndex = j * rows + i;
pTransposedData[transposedIndex] = pTensorData[index];
}
}
}
}
return transposedTensorData;
}
}
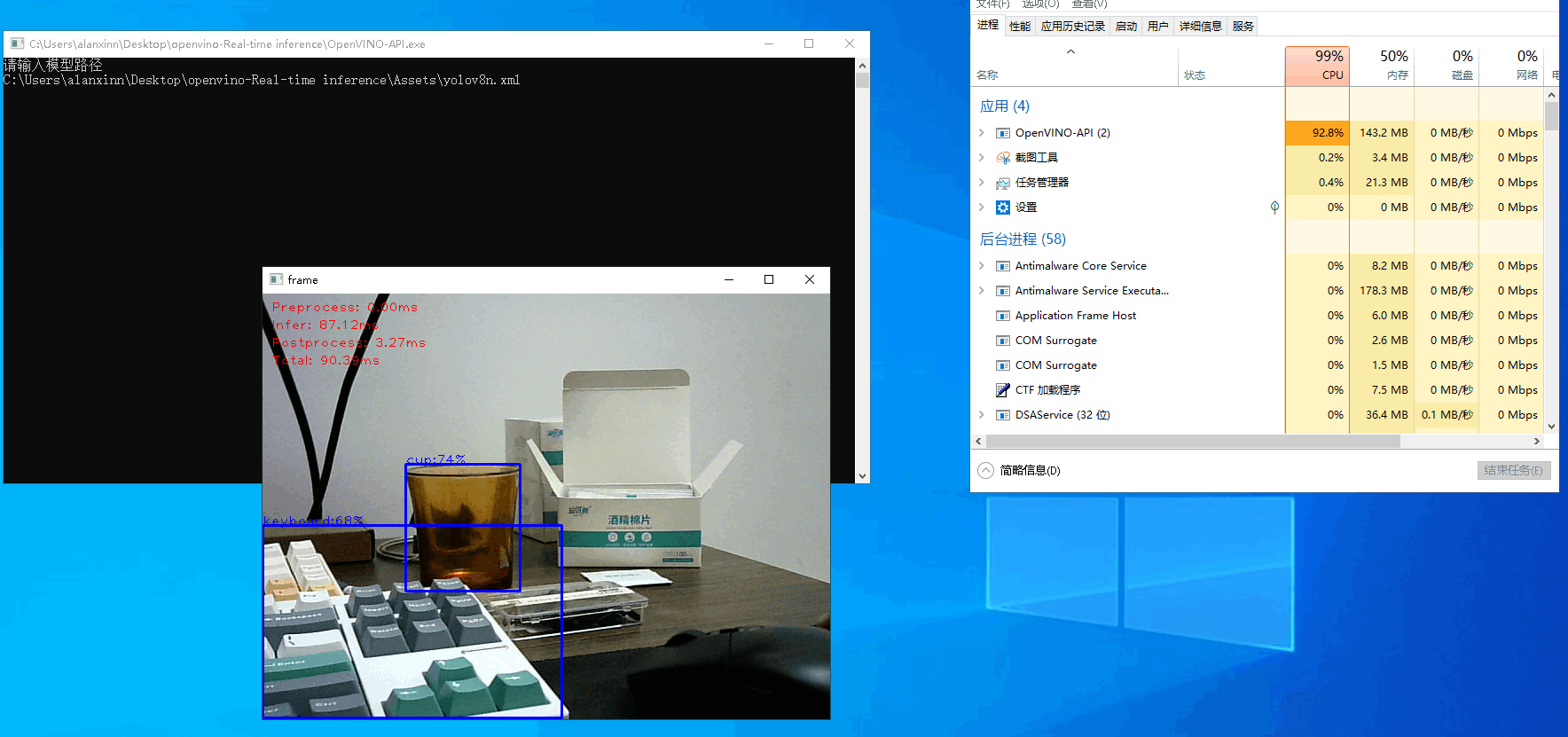
效果图
后续完善目标
优化推理速度,实现自己的det模型推理,并控制gpio输出相应信号
0个评论